 @Techmeme@techhub.social
@Techmeme@techhub.social2025-10-27 18:25:43
Filing: iRobot says its last potential buyer withdrew from the process and its financials remain dire, following Amazon abandoning a 2024 bid; IRBT drops 33% (Annie Palmer/CNBC)
https://www.cnbc.com/2025/10/27/irobot-stock-roomba.html

 @memeorandum@universeodon.com
@memeorandum@universeodon.com2025-10-28 13:40:53
Trump, 79, Gets Confused Explaining Water to the Navy (Ewan Palmer/The Daily Beast)
https://www.thedailybeast.com/trump-79-gets-confused-explaining-water-to-the-navy/
http://www.memeorandum.com/251028/p35#a251028p35
 @rasterweb@mastodon.social
@rasterweb@mastodon.social2025-10-27 00:50:57
I found MAKE celebrating Palmer Luckey to be disgusting, and I let them know it.
I never thought I would see MAKE celebrating evil people like him.
Feel free to let dale@make.co know if you're not a fan of this sort of thing.
https://makethings.make.co/p/what-a-luckey-man

 @UP8@mastodon.social
@UP8@mastodon.social2025-10-27 14:32:54
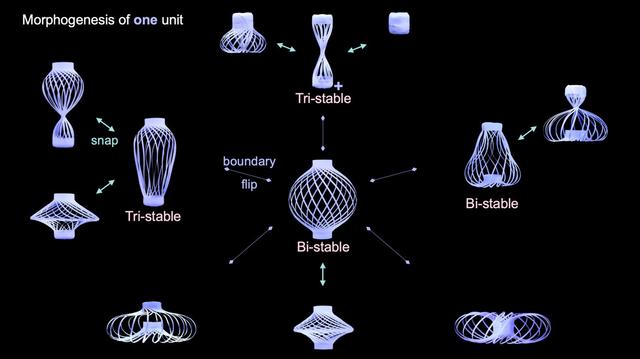
🏮 'Chinese lantern' structure shifts into more than a dozen shapes for various applications
https://techxplore.com/news/2025-10-chinese-lantern-shifts-dozen-applications.html
 @egallager@social.treehouse.systems
@egallager@social.treehouse.systems2025-10-26 21:45:18
It's frustrating to see such high turnover in the city planning office. I encourage the city to take the complaints of its exiting planners more seriously and put greater effort into their retention. It shouldn't be taking this long to get form-based zoning in place. We could have hundreds more units in place by now if our planners were allowed to simply do their jobs.
#NHPolitics #NHHousing
 @stefan@gardenstate.social
@stefan@gardenstate.social2025-12-27 05:26:34
Would love to get more folks to vote up this ticket to add this car to A Better Route Planner
#cars
 @Mediagazer@mstdn.social
@Mediagazer@mstdn.social2025-10-28 02:25:43
Sources: David Ellison will keep WBD mostly intact in a possible Paramount merger, merge HBO Max into Paramount , keep creative teams, and target 30 films/year (Christopher Palmeri/Bloomberg)
https://www.bloomberg.com/news/articles/20
@Techmeme@techhub.social2025-10-28 17:40:54
Sources: Polymarket plans to return to the US with a focus on sports betting; initial trading is likely by the end of November, but won't be broadly available (Bloomberg)
https://www.bloomberg.com/news/articles/2025-10-28…
 @outer@mas.to
@outer@mas.to2025-10-27 15:27:36
Mountaintop Guru: You see it's All Clear! You were meant to be here.
Emerson: Even with all the ear hair?
Lake: Yeah. What about that?
Palmer: I'm not with those guys.
@Techmeme@techhub.social2025-12-26 02:45:32
As startups flood the market with AI shopping agents, Amazon is playing defense by blocking agents' access to its site and investing heavily in its own tools (Annie Palmer/CNBC)
https://www.cnbc.com/2025/12/24/amazon-faces-a-dilemma-fight…
