 @cosmos4u@scicomm.xyz
@cosmos4u@scicomm.xyz2026-04-14 19:02:01
X-ray Evolution of Young Stars - Early Dimming and Coronal Softening in Solar-Mass Stars with Implications for Planetary Atmospheres: #YoungStars Dim in X-rays Surprisingly Quickly: https://chandra.si.edu/press/26_releases/press_041426.html and https://chandra.cfa.harvard.edu/photo/2026/dimming/
 @cowboys@darktundra.xyz
@cowboys@darktundra.xyz2026-03-15 17:29:26
Jerry Jones Compares Pato O'Ward's 'Controlled Intensity' to Deion Sanders' Approach https://www.foxsports.com/stories/motor/jerry-jones-indycar-pato-oward-arlington-cowboys-deion-sanders
 @memeorandum@universeodon.com
@memeorandum@universeodon.com2026-03-15 01:11:05
UF disbands College Republican chapter, citing antisemitic activity (Chelsea Long/Gainesville Sun)
https://www.gainesville.com/story/news/politics/2026/03/14/uf-college-republicans-disbanded-after-controversial-photo-emerges/89156776007/
http://www.memeorandum.com/260314/p74#a260314p74
 @leftsidestory@mstdn.social
@leftsidestory@mstdn.social2026-01-16 00:30:00
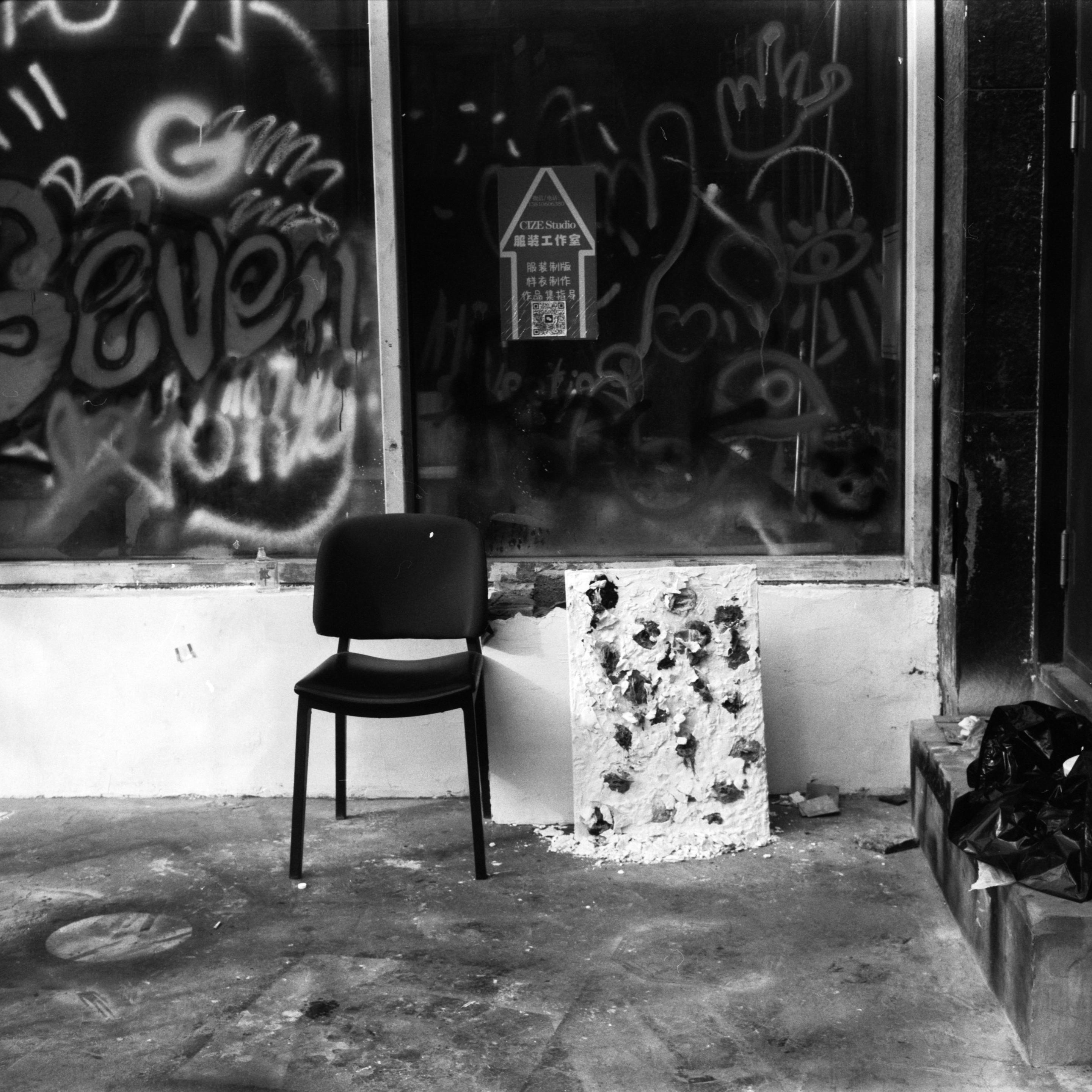
Gloom & Bloom III ☁️🌺
黑暗绽放 III ☁️ 🌺
📷 Zeiss IKON Super Ikonta 533/16
🎞️ Lucky SHD 400
#filmphotography #Photography #blackandwhite



 @wyri@toot-toot.wyrihaxim.us
@wyri@toot-toot.wyrihaxim.us2026-04-13 22:20:44
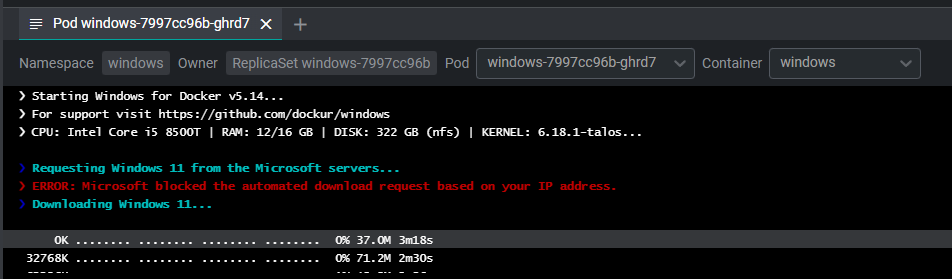
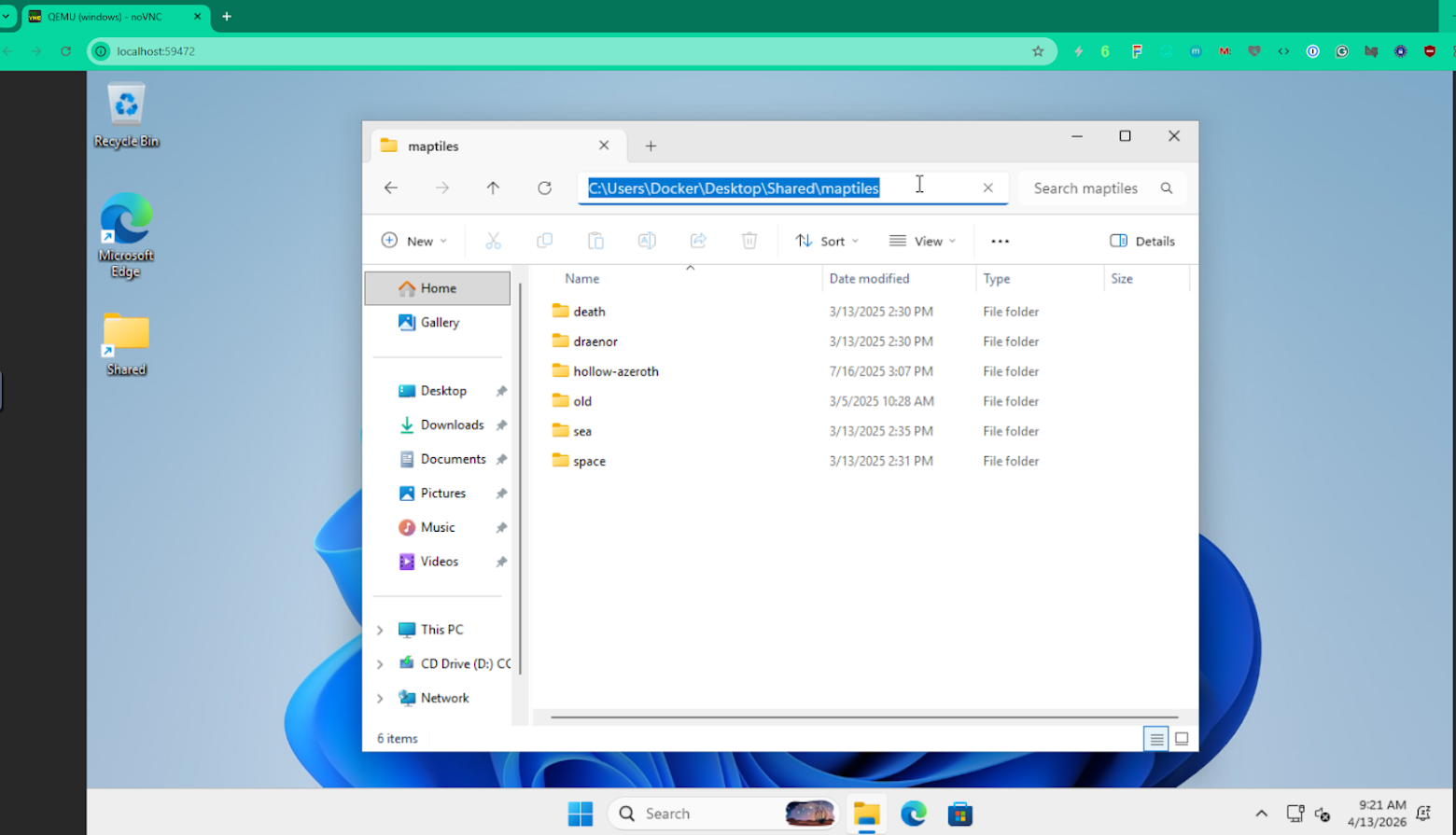
Probably the craziest thing I've done in a while: Run Windows 11 in a Pod on my Kubernetes cluster, which consists of only Linux nodes, and have a fully functioning Windows that can read/write to an NFS mount on the network. This whole thing takes 45 minutes to even reach the desktop in the current setup. But 👏 It 👏 Works. All thanks to https://
 @jorgecandeias@mastodon.social
@jorgecandeias@mastodon.social2026-04-15 13:46:07
RE: https://masto.pt/@EsquerdaNet/116408842913321073
Ah, pois, os fascistas são sempre pela transparência e contra a corrupção, não são?
Pois, poooooois...
 @matematico314@social.linux.pizza
@matematico314@social.linux.pizza2026-03-14 18:50:21
Eu ainda me irrito que o dia internacional da matemštica só faz sentido naquela notação gringa ridícula em que o mês vem na frente do ano (e aí a data de hoje fica 3/14). Eu prefiro muito mais o 22/7, mas toda desculpa para celebrar o pi é všlida rs.
#piDay #DiaInternacionalDaMatemática
 @servelan@newsie.social
@servelan@newsie.social2026-04-15 15:22:31
"Over the past few years, multiple studies arguing that amyloid-β is the central driver of Alzheimer’s disease have been retracted. Some scientists have even been indicted for fraud over the issue. All the while, none of the drugs targeting this protein and its pathway have had any real clinical effect."
What’s the deal with Alzheimer’s disease and amyloid? - Ars Technica
https://arstechnica.com/science/2026/04/whats-the-deal-with-alzheimers-disease-and-amyloid/
 @simon_brooke@mastodon.scot
@simon_brooke@mastodon.scot2026-03-13 10:58:14
"Norway’s trade in fossil fuels is like the British opium trade in the 19th century: a curse to be dumped on other countries" -- @…
That's an excellent and telling comparison.
#FossilFuels
@wyri@toot-toot.wyrihaxim.us2026-03-14 20:35:03
