Viewfinder: petting the cat
Viewfinder caught my eye when it was first demonstrated, with the ability to take photos and walk into them, and clever world manipulation. When it came out it was £20, and that seemed a little expensive for the technical sandbox I imagined it to be. Towards the end of last year it was free on PS , and given away on the Epic Game Store, and now, having played it, I can see that I was wrong: it is not just a technical sandbox, it was not too…
📰 Gut informiert zu sein, ist unser #Schutzschild gegen Polemik der #Politiker, #Lobbyisten oder Manipulation durch rechte Medien. Ich tröte kostenlos aktuelle Informationen zu
@…
Data Science is different things to different people so the list of things you need to know is hard to pin down.
It's often understood to go beyond data analysis.
In addition to Python programming and statistics you need to know at least:
- data manipulation tools including SQL, dataframes (polars, pandas)
- fund…
@…
Data Science is different things to different people so the list of things you need to know is hard to pin down.
It's often understood to go beyond data analysis.
In addition to Python programming and statistics you need to know at least:
- data manipulation tools including SQL, dataframes (polars, pandas)
- fund…
Boston Dynamics partners with Google DeepMind to integrate Gemini Robotics models into Atlas robots, boosting their object-manipulation capabilities and more (Will Knight/Wired)
https://www.wired.com/story/google-boston-dynamics-gemini-powered-robot-atlas/
Strategyproof Tournament Rules for Teams with a Constant Degree of Selfishness
David Pennock, Daniel Schoepflin, Kangning Wang
https://arxiv.org/abs/2512.05235 https://arxiv.org/pdf/2512.05235 https://arxiv.org/html/2512.05235
arXiv:2512.05235v1 Announce Type: new
Abstract: We revisit the well-studied problem of designing fair and manipulation-resistant tournament rules. In this problem, we seek a mechanism that (probabilistically) identifies the winner of a tournament after observing round-robin play among $n$ teams in a league. Such a mechanism should satisfy the natural properties of monotonicity and Condorcet consistency. Moreover, from the league's perspective, the winner-determination tournament rule should be strategyproof, meaning that no team can do better by losing a game on purpose.
Past work considered settings in which each team is fully selfish, caring only about its own probability of winning, and settings in which each team is fully selfless, caring only about the total winning probability of itself and the team to which it deliberately loses. More recently, researchers considered a mixture of these two settings with a parameter $\lambda$. Intermediate selfishness $\lambda$ means that a team will not lose on purpose unless its pair gains at least $\lambda s$ winning probability, where $s$ is the individual team's sacrifice from its own winning probability. All of the dozens of previously known tournament rules require $\lambda = \Omega(n)$ to be strategyproof, and it has been an open problem to find such a rule with the smallest $\lambda$.
In this work, we make significant progress by designing a tournament rule that is strategyproof with $\lambda = 11$. Along the way, we propose a new notion of multiplicative pairwise non-manipulability that ensures that two teams cannot manipulate the outcome of a game to increase the sum of their winning probabilities by more than a multiplicative factor $\delta$ and provide a rule which is multiplicatively pairwise non-manipulable for $\delta = 3.5$.
toXiv_bot_toot
Manipulating voters:
"AI models needn’t be more powerful, more personalized, or more skilled in advanced rhetorical techniques to be more convincing. Instead, chatbots were most effective when they threw fact-like claims at the user; the most persuasive AI models were those that provided the most “evidence” in support of their argument, regardless of whether that evidence had any bearing on reality. In fact, the most persuasive chatbots were also the least accurate."
An "AI" Toy Exposed 50,000 Logs of Its Chats With Kids to Anyone With a Gmail Account
«Margolis adds that this sort of sensitive information about a child's thoughts and feelings could be used for horrific forms of child abuse or manipulation. “To be blunt, this is a kidnapper's dream,” he says. “We're talking about information that lets someone lure a child into a really dangerous situation, and it was essentially accessible to anybody."»
Russische Schattenflotte: AIS-Manipulation hat sich verdoppelt
Eine Datenanalyse zeigt: Schiffe der russischen Schattenflotte schalten ihre Ortungssysteme doppelt so oft ab wie vor dem Ukraine-Krieg. Mit großen Risiken.
Freue mich sehr, dass die neue Ausgabe der .inf, dem Magazin der Gesellschaft für Informatik (GI) @… ,
#DigitaleGewalt als Titelthema hat und ich auch was dazu beisteuern konnte.
Es reicht nicht, nach jedem bekannt gewordenen Vorfall nach neuen Strafr…
Wie NiUS manipuliert – Markus Lanz entlarvt Desinformation - Blog von Werner Deck #NiUS ##Desinformation https://
"Our Future of Subtle Corporate Manipulation: AI Overviews of Independent Content"
#AI #enshittification #YouTube
Mastodon announced fiscal sponsorship via WE AID,
a German nonprofit organisation that supports charitable projects within an established legal framework.
This partnership offers donors
tax-deductible contributions in Germany
and ensures verified integrity through WE AID’s oversight.
It also enables Mastodon to operate as a nonprofit entity,
strengthening the commitment to a user-first, community-driven platform,
free from algorithmic manipulation an…
«JavaScript Cheat Sheet – Complete Modern JS Reference (ES6 )»
I am not a JavaScript fan and prefer to use TypeScrypt in this regard, but a modern reference helps with their current implementation.
🧑💻 https://blog.harislab.tech/articles/java…
"Tether is the treasury for Bitcoin and a coterie of related businesses. When Bitcoin crashes and people are panicking, they create Tether out of thin air to buy Bitcoin. That allows the game of musical chairs to continue. They simply cannot disclose how much reserves they have to back the peg because it is designed as an instrument of market manipulation."
Great comment from the FT
Medienversagen. Ein Jahr in die zweite Amtszeit von Donald Trump hinein, nach Säuberung offizieller Seiten von unliebsamen Inhalten und offener Desinformation durch die Regierung, dies noch als Frage zu formulieren statt als Fakt, ist unfassbar. https://www.
If you disagree, I respect that, but I am personally a victim of this kind of dictionary manipulation and distortion. It is deeply frustrating to see definitions twisted and weaponized against me, and the true meaning of syndicalism, as if bending language could erase its real principles and goals. This kind of intellectual dishonesty is not only misleading but also personally disempowering for those of us who stand for genuine social change.
I advocate for the collectivization of land…
Manipulation of the orbital angular momentum of soft x-ray beams by consecutive diffractive optics
Nazir Khan, Rahul Jangid, Taras Stanislavchuk, Aaron Stein, Oleg Chubar, Andi Barbour, Andrei Sirenko, Valery Kiryukhin, Claudio Mazzoli
https://arxiv.org/abs/2511.17768 https://arxiv.org/pdf/2511.17768 https://arxiv.org/html/2511.17768
arXiv:2511.17768v1 Announce Type: new
Abstract: Production and manipulation of orbital angular momentum (OAM) of coherent soft x-ray beams is demonstrated utilizing consecutive diffractive optics. OAM addition is observed upon passing the beam through consecutive fork gratings. The OAM of the beam was found to be decoupled from its spin angular momentum (SAM). Practical implementation of angular momentum control by consecutive devices in the x-ray regime opens new experimental opportunities, such as direct measurement of OAM beams without resorting to phase sensitive techniques, including holography. OAM analyzers utilizing fork gratings can be used to characterize the beams produced by synchrotron and free electron lasers sources; they can also be used in scattering experiments.
toXiv_bot_toot
🚨 Grandir dans la secte OKC (Ogyen Kunzang Choling), aujourd’hui rebaptisée CBM (Centre Bouddhique Mahayana), c’est grandir dans un environnement où l’emprise et la manipulation façonnent chaque aspect de la vie sous l’autorité de Robert Spatz.
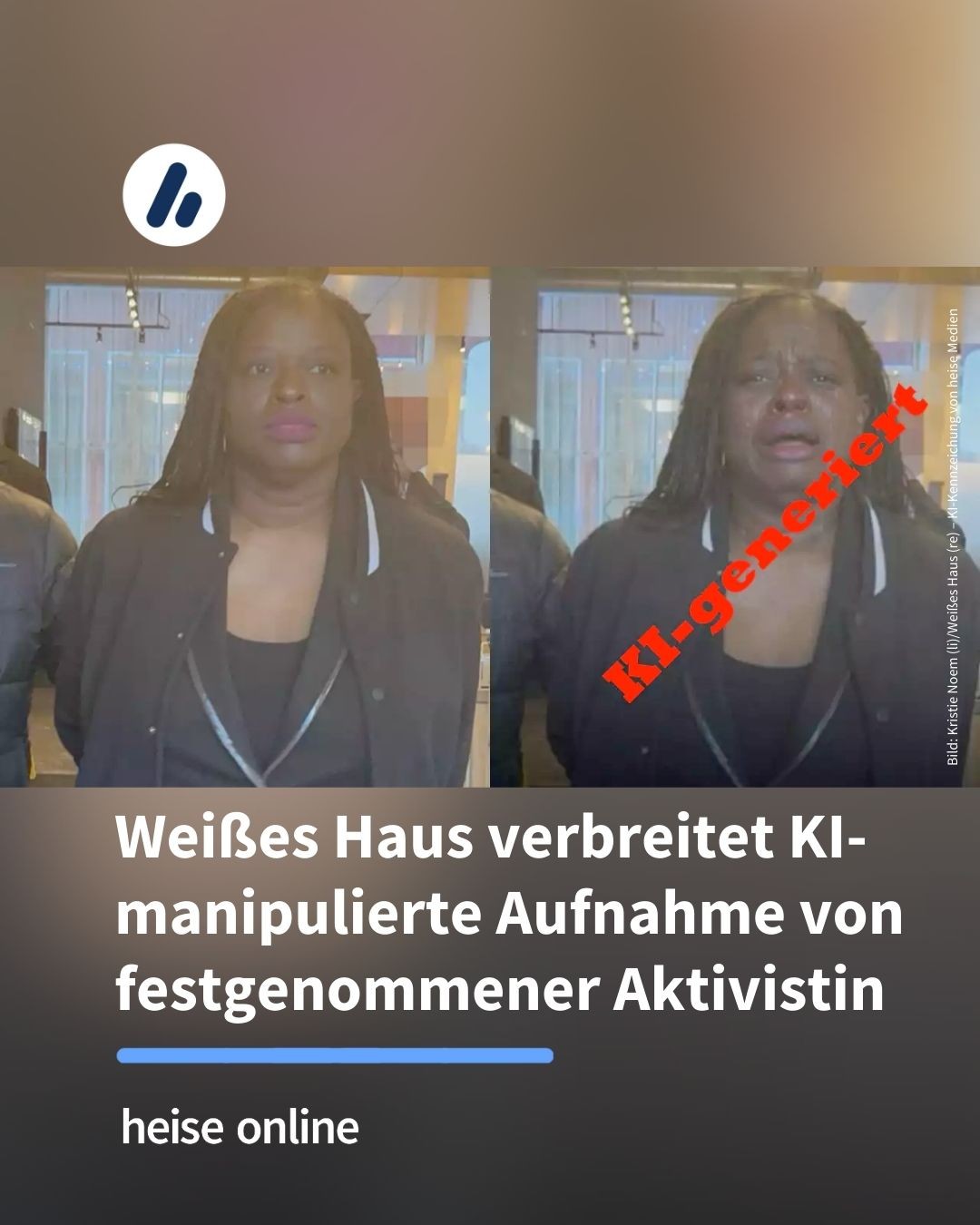
Digitale Manipulation auf Regierungsebene: Das Weiße Haus hat ein künstlich verändertes Foto einer festgenommenen Bürgerrechtsaktivistin in sozialen Netzwerken geteilt.
Zum Artikel: https://heise.de/-11151370?wt_mc=sm.red.ho.mas…
I'm looking at a bunch of open clipart icons and some of them have straightforward licenses like CC or public domain.
But others are using more software-oriented licenses like GPL or LGPL. I'm... not entirely sure how that is supposed to work.
If I load a GPL'd icon PNG into my application is that "dynamic linking" in a way that would require my entire application to be GPL? There's no code involved, no symbol manipulation, and the icon isn't compile…
The global financial system would I’m sure be •extremely• reluctant to abandon the USD as the world’s reserve currency — reluctant even well past some hypothetical point where it became clear that the Fed has become politicized and is engaging in currency manipulation to politically favor Trump. The market can stay irrational for a very long time.
But if that abandonment did happen, well…that would be a pretty hard genie to stuff back in the bottle, and I can’t even begin to imagine the fallout.
Crosslisted article(s) found for cs.GR. https://arxiv.org/list/cs.GR/new
[1/1]:
- Optimization and Mobile Deployment for Anthropocene Neural Style Transfer
Po-Hsun Chen, Ivan C. H. Liu
https://arxiv.org/abs/2601.21141 https://mastoxiv.page/@arXiv_csHC_bot/115983012560898066
- HiFi-Mesh: High-Fidelity Efficient 3D Mesh Generation via Compact Autoregressive Dependence
Yanfeng Li, Tao Tan, Qingquan Gao, Zhiwen Cao, Xiaohong liu, Yue Sun
https://arxiv.org/abs/2601.21314 https://mastoxiv.page/@arXiv_csCV_bot/115983484680840673
- Synthetic-to-Real Domain Bridging for Single-View 3D Reconstruction of Ships for Maritime Monitoring
Borja Carrillo-Perez, Felix Sattler, Angel Bueno Rodriguez, Maurice Stephan, Sarah Barnes
https://arxiv.org/abs/2601.21786 https://mastoxiv.page/@arXiv_csCV_bot/115983653113440181
- EditYourself: Audio-Driven Generation and Manipulation of Talking Head Videos with Diffusion Tran...
Flynn, Paier, Dinev, Nguyen, Poghosyan, Toribio, Banerjee, Gafni
https://arxiv.org/abs/2601.22127 https://mastoxiv.page/@arXiv_csCV_bot/115983720617201966
toXiv_bot_toot
A propos du livre When Prophecy Fails, qui a proposé la théorie de la dissonance cognitive:
"cet article démontre que les affirmations centrales du livre sont fausses et que les auteurs [du livre] savaient qu'elles l'étaient. [...] [Les auteurs de l'article] exposent également de graves violations éthiques commises par les chercheurs, notamment la fabrication de messages psychiques, la manipulation secrète et l'ingérence dans une enquête sur la protection de l'…
Manipulation of photonic topological edge and corner states via trivial claddings
Hai-Xiao Wang, Li Liang, Shuai Shao, Shiwei Tang, Junhui Hu, Yin Poo, Jian-Hua Jiang
https://arxiv.org/abs/2511.18705 https://arxiv.org/pdf/2511.18705 https://arxiv.org/html/2511.18705
arXiv:2511.18705v1 Announce Type: new
Abstract: Crystalline symmetry offers a powerful tool to realize photonic topological phases, in which additional trivial claddings are typically required to confine topological boundary states. However, the utility of the trivial cladding in manipulating topological waves is often overlooked. Here, we demonstrate two topologically distinct kagome photonic crystals (KPCs) based on different crystalline symmetries: \mathbit{C}_\mathbf{6}- symmetric KPCs exhibit a quantum spin Hall phase, while \mathbit{C}_\mathbf{3}-symmetric KPCs serve as trivial cladding. By tuning the geometric parameter of the trivial cladding, we observe that a pair of topological interface states featured with pseudospin-momentum locking undergoes a phase transition, accompanied by the appearance and disappearance of corner states in a finite hexagonal supercell. Such a geometry-induced band inversion is characterized by a sign change in the Dirac mass of the topological interface states and holds potential for applications such as rainbow trapping. Furthermore, we experimentally demonstrate the corner states, which is a hallmark of higher-order topology, also depend critically on the trivial cladding. Our work highlights the crucial role of trivial claddings on the formation of topological boundary states, and offers a novel approach for their manipulation.
toXiv_bot_toot
5-Minuten-Training schärft Blick, um KI-Gesichter zu erkennen
KI-generierte Gesichter können gezielt zur Täuschung eingesetzt werden und damit Desinformation, Identitätsmissbrauch und Manipulation in sozialen Netzwerken erleichtern. Eine neue Studie zeigt allerdings, dass schon wenige Minuten Training ausreichen, um Menschen deutlich besser darin zu machen, KI-generierte Gesichter zu erkennen
📸
A University of Cambridge analysis reveals how cheap SMS text message verification to create online accounts fuels global influence and manipulation campaigns (Clive Cookson/Financial Times)
https://www.ft.com/content/12105e19-208b-44ad-986d-398e68fc2270
🚨 Grandir dans la secte OKC (Ogyen Kunzang Choling), aujourd’hui rebaptisée CBM (Centre Bouddhique Mahayana), c’est grandir dans un environnement où l’emprise et la manipulation façonnent chaque aspect de la vie sous l’autorité de Robert Spatz.
If I’ve stopped lying, then you should too. But you can’t seem to stop twisting the truth about anarchism, using the dictionary as a weapon to bend reality toward your own system and agenda. That manipulation says more about your control than my beliefs.
Die bestehende Weltordnung ist nicht „in der Krise“, sie ist zerbrochen. Was wir erleben, ist die Rückkehr eines ungezügelten Imperialismus. Zwischen Trump, Tech-Oligarchen und medialer Manipulation wächst meine Sorge, die falschen Kräfte dauerhaft die Oberhand behalten. #USA #Trump
Mesh of Spatiotemporal Optical Vortices with Programmable Intensity Nulls
Jinxin Wu, Dan Wang, Qingqing Liang, Jianhua Hu, Jiahao Dong, Jijun Feng, Yi Liu
https://arxiv.org/abs/2511.18087 https://arxiv.org/pdf/2511.18087 https://arxiv.org/html/2511.18087
arXiv:2511.18087v1 Announce Type: new
Abstract: Light carrying transverse orbital angular momentum (T-OAM) in the form of spatiotemporal optical vortices (STOVs) is opening new degrees of freedom for structured light manipulation. Such spatiotemporal wavepackets hold significant potential for optical trapping, analog optical computing, studying photonic symmetry and topology, among others. Up to now, synthesizing of such vortices is limited in one dimension, either in temporal or spatial domain. In this work, we propose and experimentally demonstrate a two-dimensional flexible mesh of spatiotemporal optical vortices (M-STOV) with programmable intensity nulls, and analyze their diffraction patterns for detection. Furthermore, we extend the spectral range of M-STOV via second-harmonic generation while examining the transfer of OAM in this nonlinear process. This study establishes a foundational framework for designing higher dimensional spatiotemporal vortex fields and promises a high-capacity information carrier based on ST optical vortices.
toXiv_bot_toot
🚨 Grandir dans la secte OKC (Ogyen Kunzang Choling), aujourd’hui rebaptisée CBM (Centre Bouddhique Mahayana), c’est grandir dans un environnement où l’emprise et la manipulation façonnent chaque aspect de la vie sous l’autorité de Robert Spatz.
Bei WhatsApp habe kaum Einzelchats, nur Gruppen, z.B. in KiTa-Elterngruppen: Die anderen Mamas wollen davon nichts hören. Alles findet da auf WhatsApp und Insta statt.
Meine einzige Handlungsoption ist eben rausgehen und mich von relevanter Information abschneiden.
Da sind so viele Aspekte wie z.B. Suchtmechanismen, psychologische Manipulation, Überforderung durch den Alltag Technik, etc. Es ist komplex.
#Fedieltern: Da müssen wir ran.
Now that Musk has offloaded Twitter and his AI experiments to SpaceX, he can be sure the government will bail it out when the AI bubble pops. The government's defense industry depends upon SpaceX for access to space.
This is probably the main reason for the "sale" transferring money from one of Musk's bank accounts to another of Musk's bank accounts.
The AI price bubble popping could have wiped out xAI and thus Twitter with it, but now it's cushioned against that by contracts with a government who can't afford to allow their only real space access to go bust.
So he can subsidize his failing AI business and his unprofitable media-manipulation efforts at Twitter with his government-protected failing exploding space-rocket project.
All protected by the lie which the media keep repeating uncritically that it makes any sense at all to have data centers in space.
What a great businessman.
#musk #spacex #twitter #xai
 @Xexyz@mastodon.me.uk
@Xexyz@mastodon.me.uk